How to implement trajectory generation?
(contribution by Adrien Lafage @alafage)
This library provides a Generation class for creating synthetic traffic data.
It implements fit() and sample() methods that call the corresponding
methods in the generative model passed as argument.
You can import this class with the following code:
from traffic.algorithms.generation import Generation
To instantiate such an object you can pass those arguments:
generation: Any object implementingfit()andsample()methods. It will define the generative model to use.features: The list of the features to represent a trajectory.scaler: A scaler that is optional to make sure each feature weights the same during the fitting part.
In the case the generative model within your Generation object is not fitted
to any Traffic object, you can use the fit() method. Depending on the
generative model used, its fit() method can be rather time-consuming, esp.
with neural network-based generative models.
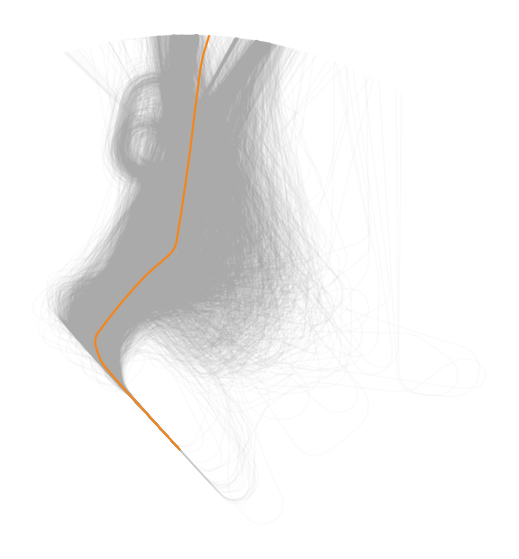
We load here traffic data of landing trajectories at Zurich airport coming from the north.
import matplotlib.pyplot as plt
from traffic.data.datasets import landing_zurich_2019
from cartes.crs import EuroPP
t = (
landing_zurich_2019
.query("runway == '14' and initial_flow == '162-216'")
.assign_id()
.unwrap()
.resample(100)
.eval()
)
with plt.style.context("traffic"):
ax = plt.axes(projection=EuroPP())
t.plot(ax, alpha=0.05)
t.centroid(nb_samples=None, projection=EuroPP()).plot(
ax, color="#f58518"
)
Before any fitting, we enrich the Traffic DataFrame with the features we might
want to use to generate trajectories. For example, instead of working with
longitude and latitude values, we can compute their projection (x
and y respectively).
t = t.compute_xy(projection=EuroPP())
To keep track of time we propose to compute a timedelta parameter which is
for each trajectory coordinates, the difference in seconds with the beginning
of the trajectory.
from traffic.core import Traffic
def compute_timedelta(df: "pd.DataFrame"):
return (df.timestamp - df.timestamp.min()).dt.total_seconds()
t = t.iterate_lazy().assign(timedelta=compute_timedelta).eval()
Now we can use the fit() method to fit our generative model, here a Gaussian
Mixture with two components.
from sklearn.mixture import GaussianMixture
from sklearn.preprocessing import MinMaxScaler
g1 = Generation(
generation=GaussianMixture(n_components=2),
features=["x", "y", "altitude", "timedelta"],
scaler=MinMaxScaler(feature_range=(-1, 1))
).fit(t)
Note
This code is equivalent to the following call on the Traffic object:
g2 = t.generation(
generation=GaussianMixture(n_components=1),
features=["x", "y", "altitude", "timedelta"],
scaler=MinMaxScaler(feature_range=(-1, 1))
)
Warning
Make sure the generative model you want to use implements the fit() and sample() methods.
Then we can sample the fitted model to produce new Traffic data.
t_gen1 = g1.sample(500, projection=EuroPP())
t_gen2 = g2.sample(500, projection=EuroPP())
with plt.style.context("traffic"):
fig, ax = plt.subplots(1, 2, subplot_kw=dict(projection=EuroPP()))
t_gen1.plot(ax[0], alpha=0.2)
t_gen1.centroid(nb_samples=None, projection=EuroPP()).plot(
ax[0], color="#f58518"
)
t_gen2.plot(ax[1], alpha=0.2)
t_gen2.centroid(nb_samples=None, projection=EuroPP()).plot(
ax[1], color="#f58518"
)
Warning
This very naive model obviously does not produce very convincing results. More appropriate methods will be provided in a near future.
- class traffic.algorithms.generation.Generation(generation, features, scaler=None)
Bases:
objectGeneration class to handle trajectory generation.
- generation: GenerationProtocol
generation model, should implement
fit()andsample()methods.- features: List[str]
List of features to generate. Example:
['latitude', 'longitude', 'altitude', 'timedelta'].- scaler: ScalerProtocol, default: None
if need be, apply a scaler to the data before fitting the generation model. You may want to consider StandardScaler(). The scaler object should implement
fit_transform()andinverse_transform()methods.
- build_traffic(X, projection=None, coordinates=None, forward=True)
Build Traffic DataFrame from numpy array according to the list of features
self.features.- Return type:
- sample(n_samples=1, projection=None, coordinates=None, forward=True)
Samples trajectories from the generation model.
- Return type:
- n_samples: int, default: 1
Number of trajectories to sample.
- projection: pyproj.Proj, cartopy.Projection, default: None
Required if the generation model uses
xandyprojections instead oflatitudeandlongitude.- coordinates: Dict[str, float], default: None
Required if the generation model uses
trackandgroundspeedinstead oflatitudeandlongitude. It should have'latitude'and'longitude'keys. Example:{'latitude': 12.2, 'longitude': 43.5}.- forward: bool, default: True
Indicates whether the
coordinatesattribute corresponds to the first coordinate of the trajectories or the last one. IfTrueit is the first, else it is the last.- Example usage:
# Generation of 10 trajectories with track and groundspeed # features, considering some ending coordinates for each # trajectories. t_gen = g.sample( 10, coordinates={"latitude": 15, "longitude":15}, forward=False, )